|
全国服务电话17722696701
|
搜索
|
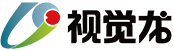
VD3系列3D视觉传感器


VD3系列3D视觉传感器
高精度
搭载130万像素(VD300系列)和2500万像素 (VD310系列)成像芯片,通过一次扫描即可获得多处微小特征数据。是如今行业内高精度的结构光扫描器,通过一次扫描即可实现对不同特征物体高精度、全视野的三维测量。
快速的在线检测
搭载多核处理器和GPU图像处理器帮助客户实现在线三维检测的节拍要求,它能够帮助用户以更高性价比解决各种复杂的三维检测难题。
无需编程
通过与龙睿相连,其图形图像界面给用户提供了非常直观的用户体验,无需软件工程师编程,易使用。
体积小、重量轻
小巧轻便的设计让它很容易安装在狭小的空间或机器人手臂上。
视觉龙VD300 3D相机其简单与灵活的设计是基于激光三角测量法,通过提高产品有效检测而使工厂减少成本和实现利润最大化,完全可以替代进口产品。
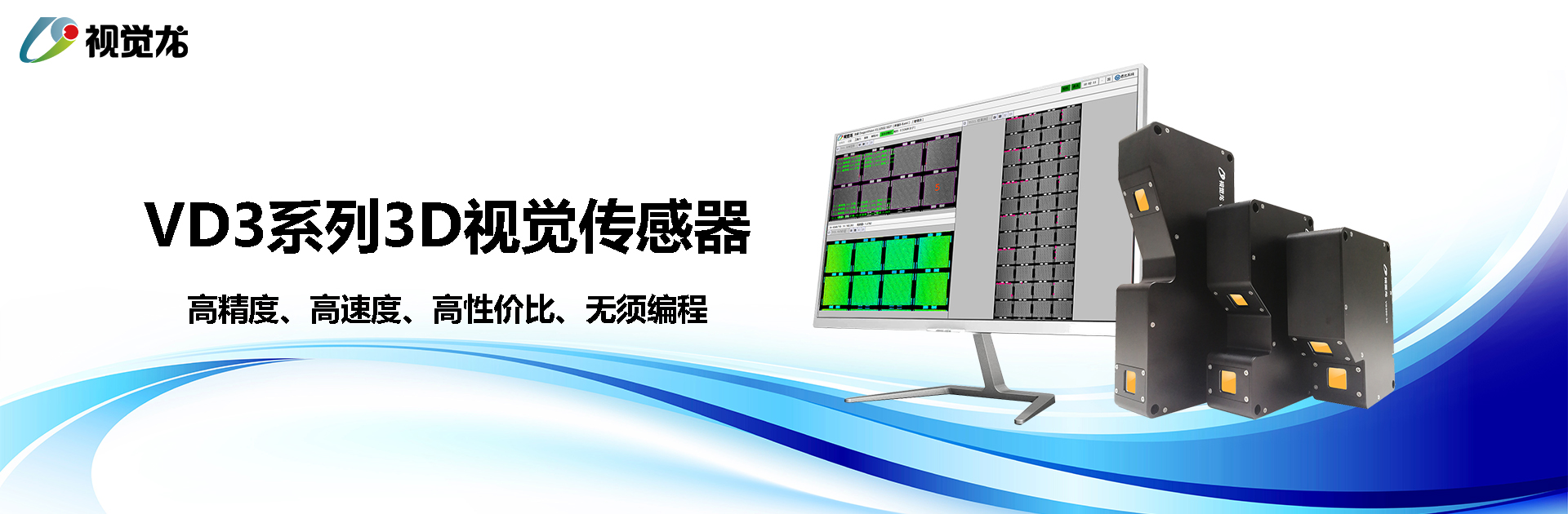
三维图像获取方法:利用结构光在相机上的成像可通过三角关系计算出表面物体的高度。
三维伪彩图:利用相机所拍摄结构光得到一个高度,转换为颜色以区分不同高度。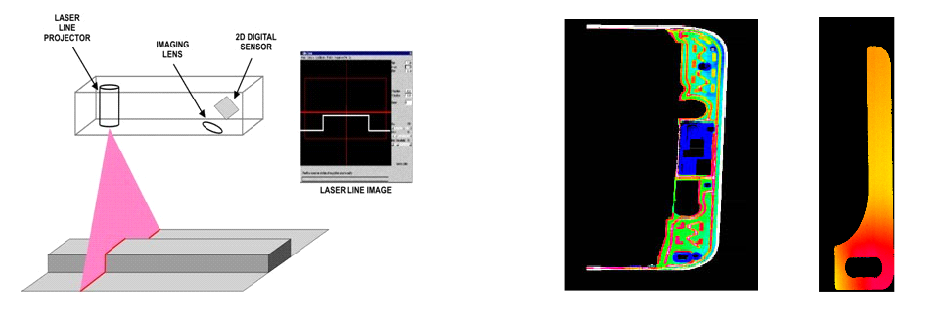
检测界面:可以选择界面上的任意位置来获取高度信息,一般可获取感兴趣区域内的平均高度、最大高度、最小高度等。
基面校正:选择检测物体的底面为基面来进行基面校正。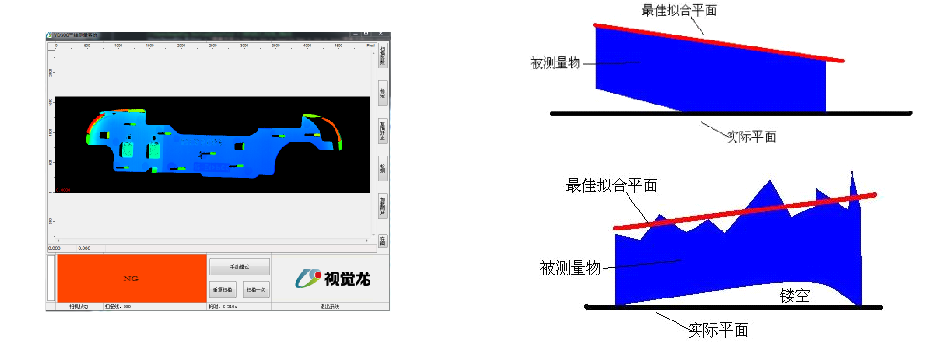
3D几何形状:任何人均可轻松设置,仅需选择测量位置的轻松操作。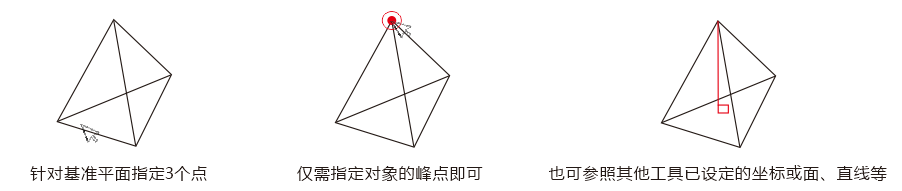
多相机方案:以防一个相机精度不够,可融合来自2个或多个方向的轮廓信息,补充原理上无法测量的死角信息。对于精度要求高且尺寸大的物体,可采用多相机成像后拼接以满足测量精度要求。
线性扫描间隔调整功能:该工具可计算拍摄图像的长宽比为1:1时的线性扫描间隔。可选择最佳方式,例如通过测量结果和实际尺寸进行换算的方法及通过编码器的规格进行计算的方法等。
三维高度标定:将像素值转换为高度值,需要一组不同高度的标定块来标定,中间值采用插补法,最终形成一个标定转换公式。

VD300系列技术参数:
| 产品型号 | VD30010 | VD30020 | VD30070 | VD30160 |
| X轴轮廓点数 | 1280 | 1280 | 1280 | 1280 |
| Z方向重复精度 | 0.8um | 1.5um | 5.5um | 12.5um |
| X方向重复精度 | 3.9um | 7.8um | 27.5um | 62um |
| 轮廓数据间隔 (X轴) | 10um | 21um | 52um | 125um |
| 基准距离 | 20mm | 40mm | 60mm | 300mm |
| Z向测量范围 | ±7mm | ±15mm | ±40mm | ±100mm |
| X向测量范围(近端) | 12mm | 25mm | 55mm | 120mm |
| X向测量范围(标准) | 13.5mm | 27.5mm | 67.5mm | 160mm |
| X向测量范围(远端) | 15mm | 29mm | 80mm | 200mm |
| 扫描速度(HZ) | 200-2400 | 500-8000 | 500-8000 | 500-8000 |
| 激光种类 | 405nm蓝光 | |||
| 输入 | 支持单端和差分编码器信号 | |||
| 软件 | 龙睿 DragonVision | |||
| 产品型号 | VD31010 | VD31020 | VD31040 | VD31070 | VD31200 | VD31500 |
| X轴轮廓点数 | 5120 | 5120 | 5120 | 5120 | 5120 | 5120 |
| Z方向重复精度 | 0.16um | 0.35um | 0.7um | 1.2um | 4um | 10um |
| X方向重复精度 | 0.8um | 1.5um | 3um | 6um | 9um | 48um |
| 轮廓数据间隔(X轴) | 1.5um | 3.1um | 6.8um | 14um | 41um | 100um |
| 基准距离 | 20mm | 60mm | 75mm | 200mm | 380mm | 800mm |
| Z向测量范围 | ±2.2mm | ±4mm | ±20mm | ±30mm | ±50mm | ±200mm |
| X向测量范围(近端) | 7mm | 15mm | 30mm | 64mm | 180mm | 300mm |
| X向测量范围(标准) | 7.5mm | 16mm | 35mm | 72mm | 210mm | 510mm |
| X向测量范围(远端) | 8mm | 17mm | 39mm | 80mm | 240mm | 720mm |
| 扫描速度(HZ) | 60-3000 | 100-5000 | ||||
| 激光种类 | 405nm蓝光 | |||||
| 输入 | 支持单端和差分编码器信号 | |||||
| 软件 | 龙睿 DragonVision | |||||
Copyright © 2019 视觉龙 All Rights Reserved 深圳视觉龙智能传感器有限公司 粤ICP备12012923号
