全国服务电话0755-82721850 |
搜索
|
PCB定位纠偏应用案例

PCB定位纠偏应用案例
采用“龙睿智能相机”双相机定位,适用于各种PCB板的定位纠偏,对位贴合以及切割等。
分享到:
本项目采用“龙睿智能相机”双相机定位,相机一定位A产品,相机二定位B产品或是治具。“龙睿智能相机”具备读取和存储功能,可由工程师根据产品类型进行预编。拥有记忆功能可自动保存配置,根据需求来回切换配置。视觉定位精度0.04mm,以800工作半径四轴机器人为例,重复精度±0.03mm,联合精度0.05-0.1mm范围内。该项目适用于各种PCB板的定位纠偏,对位贴合以及切割等。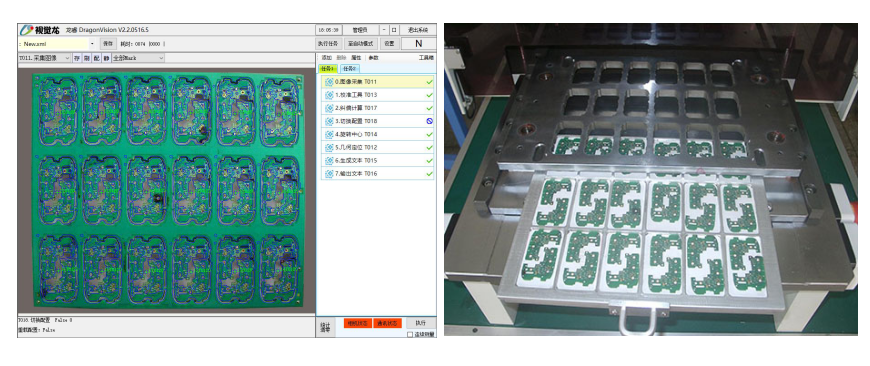
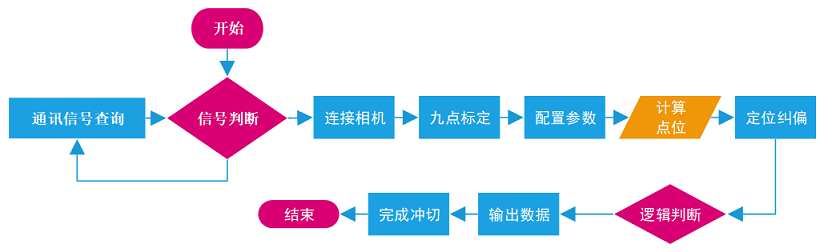
本项目涉及三方合作,PLC、机器人和视觉需要统一流程和统一通讯方式。较为繁琐的机器调试步骤,在三方不断的探讨中优化了流程和方式,实现了全自动化。
纠偏计算:因产品软易出现变形,当产品出现位置偏移后,通过龙睿智能相机独特的算法计算出坐标的变化实行自动纠正偏移值。
切换配置:由于需要面对不同规格不同大小不同颜色的PCB板,可调用不同的配置来完成要求,通过触发命令实现自动切换不同的配置。
智能化:通过机械手与视觉软件的协作,切换产品时一键自动标定、自动记录点位。
逻辑判断及纠错功能:可实现在物料错放时,非正常断电时终止操作,避免误操。
与传统方案对比:
随着产品的高精度化迅猛发展,要求生产工序具备高准确性,同时还要提高生产率和成品率,传统的人工操作定位无法满足产品高精度化、高效率的需求,龙睿智能相机的定位纠偏功能的导入,刚好可以满足这一需求。
传统方案中使用人工定位,人工检测容易受到疲劳情绪等多方面影响,精度难以保证。且人工定位速度缓慢,难以达到高速生产线的需求。而机器视觉定位精度高,定位结果稳定可靠。并且机器不会累,可24小时工作。机器可以储存不同的配置,面对不同的产品相比人工大大减少操作量和计算量。
上一个:
双相机全自动点胶应用案例
下一个:
轮毂定位打磨项目案例

Copyright © 2019 视觉龙 All Rights Reserved 深圳视觉龙智能传感器有限公司 粤ICP备12012923号