全国服务电话0755-82721850 |
搜索
|
机器人行业3D视觉引导解决方案

机器人行业3D视觉引导解决方案
单目/双目相机/激光线扫3D相机/TOF相机,实现精准上下料、定位装配、无序分拣、拆垛等场景。
分享到:
机器人行业3D视觉引导解决方案
本方案采用视觉龙VD 230 机器人3D视觉引导系统,通过处理工件的3D点云数据,对工件进行定位,同时确定其位置信息,引导机器人进行工作。可根据客户的不同精度和工作距离等需求,通过识别算法、高精度自动化标定、抓取规划、轨迹规划,实现单目/双目/激光线扫/TOF等多场景应用。实现了工业机器人自动化产线的真正柔性工装。
单目3D视觉引导
仅利用一台工业相机完成定位工作,通过畸变矫正算法等计算出待测物体方向和位置,引导机器人抓取。此种方案性价比高,定位速度快,适合比较扁平化的工件或产品。
双目3D视觉引导
一般由双相机运用视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。此方案具有效率高、精度合适、系统结构简单等优点。
激光线扫3D视觉引导
主要由激光仪和相机构成,通过激光发出线性激光信号投射到工件表面,利用结构光在相机上的成像可通过三角关系计算出表面物体的高度,从而得出物体的三维信息。
TOF 3D视觉引导
飞行时间法3D成像是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。TOF相机体积小巧,非常适合于一些需要轻便、小体积相机的场合。
可应用场景
● 料框堆叠物体的立体识别定位;
● 工件的散乱、无序来料定位抓取;
● 曲面容器里工件上下料定位;
● 多品种工件的机器人3D抓取上料定位;
● 复杂多面工件的柔性化3D抓取定位;
● 等等。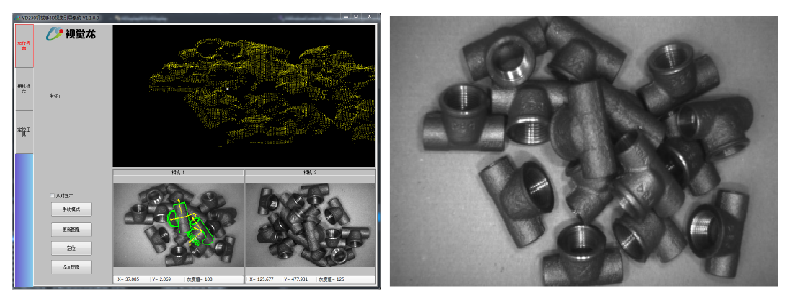
上一个:
FIR柔性检测机器人-服务器内观检测项目
下一个:
桌面型机器人视觉定位解决方案

Copyright © 2019 视觉龙 All Rights Reserved 深圳视觉龙智能传感器有限公司 粤ICP备12012923号